Mission summary
Preview image

Preview image generated at the end of the scan.
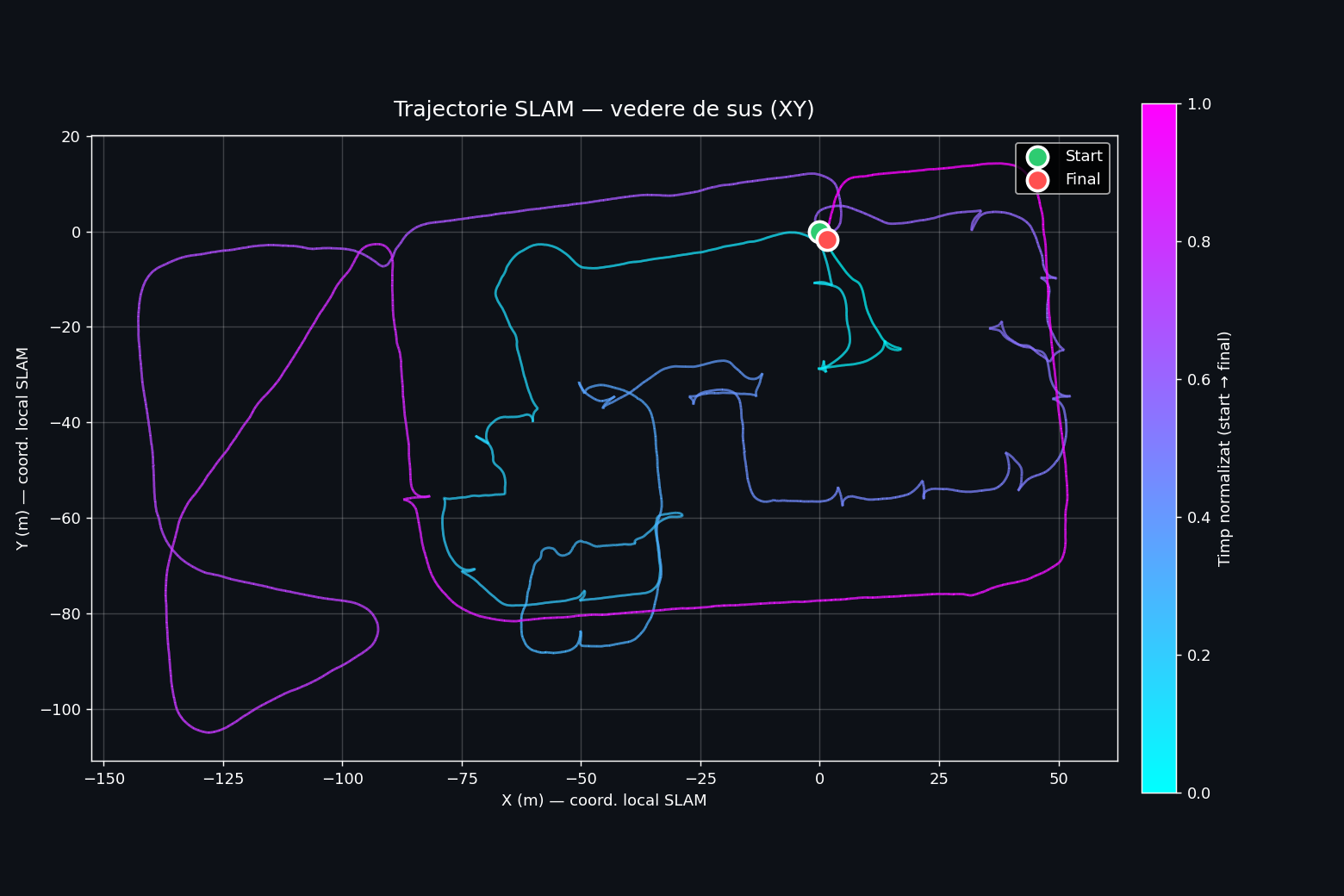
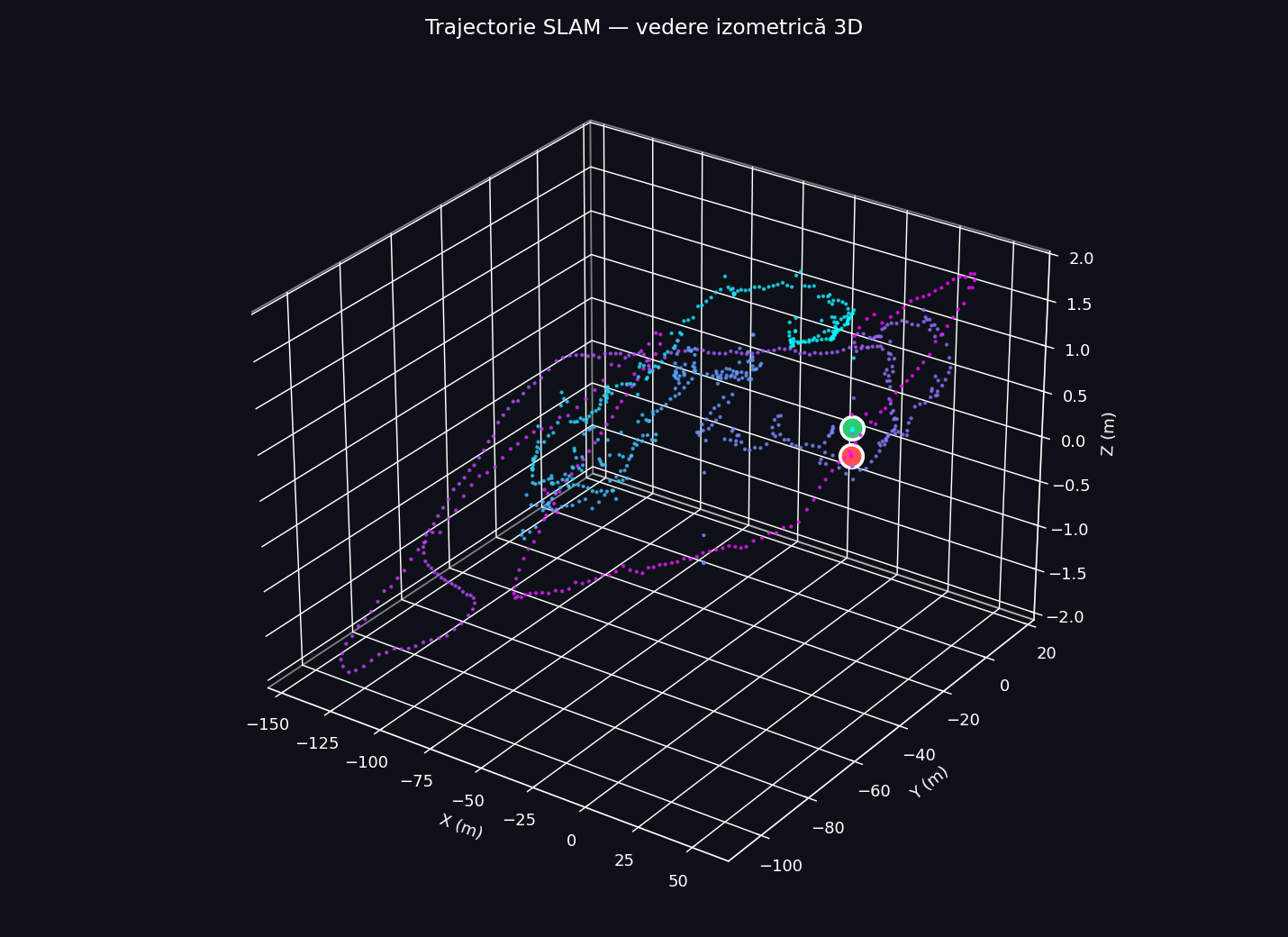
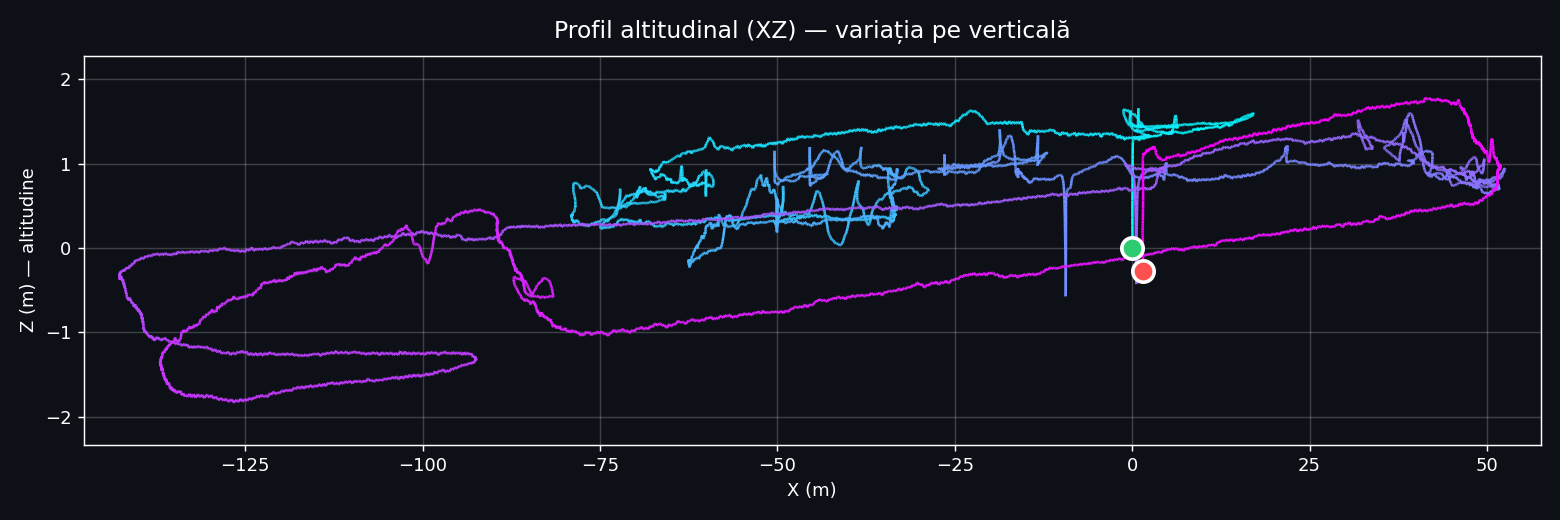
SLAM Trajectory
Scanner path in the local SLAM coordinate system (origin = start point). Line color encodes time (cyan→magenta = start→end). Start: green End: red
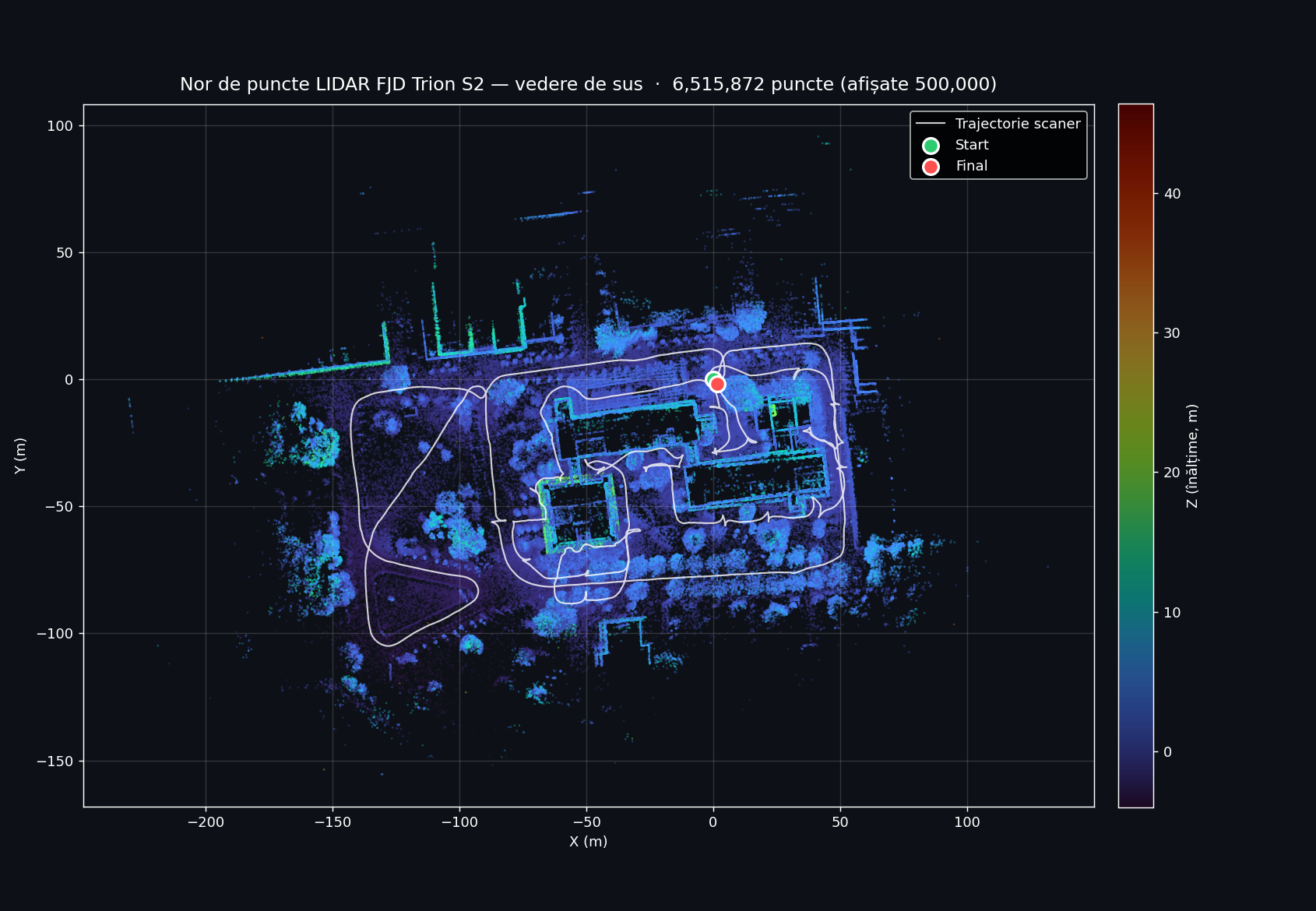
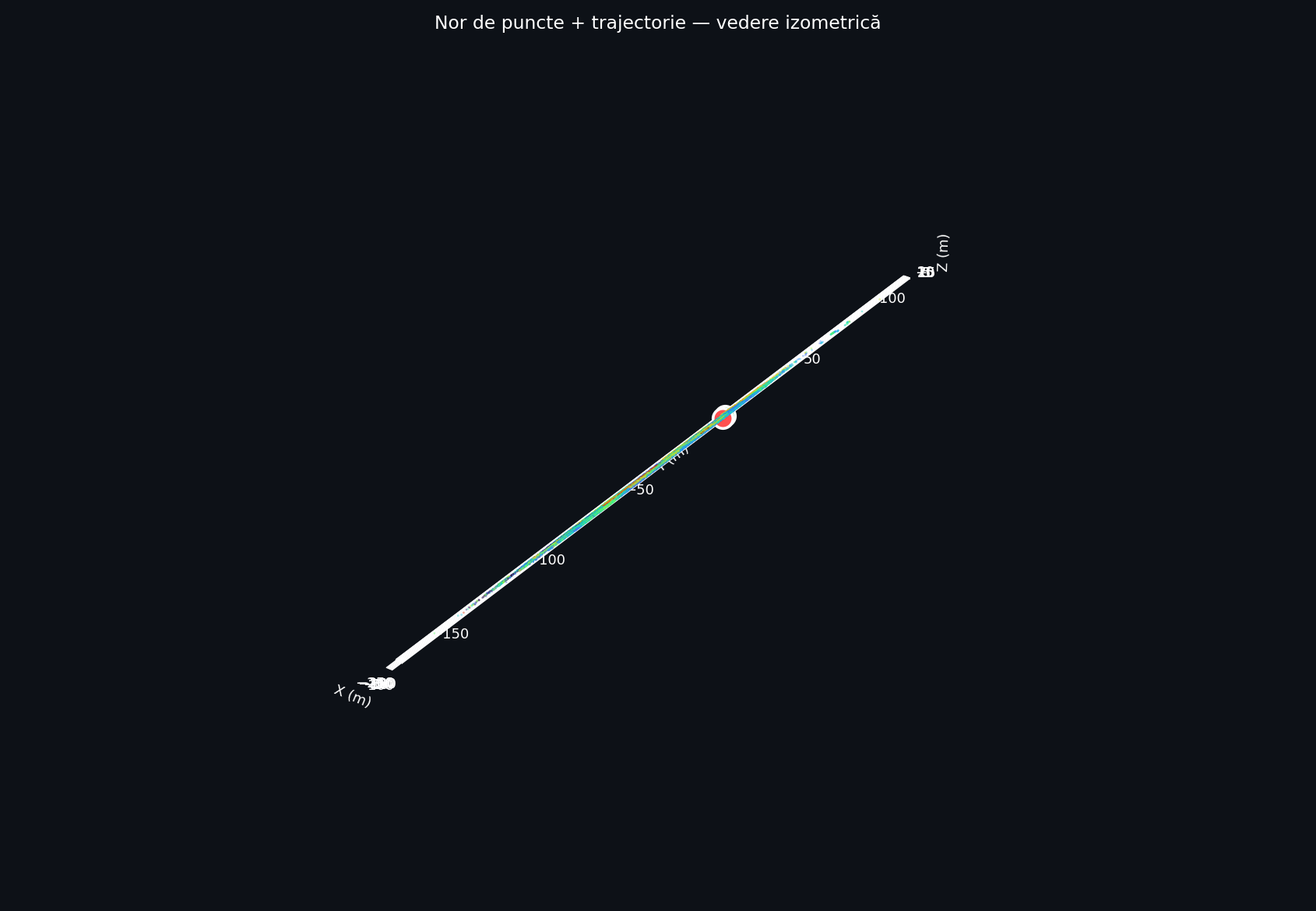
LiDAR Point Cloud
6,515,872 points captured by the FJD Trion S2 LiDAR sensor (FOV 360°×270°, range up to 120 m at 80% reflectivity, 640,000 pts/s). Color = Z height. The scanner trajectory is overlaid in white.
Interactive 3D viewer LIVE · Potree
LiDAR point cloud result, hosted on drone.ugaerial.ro — UGA Aerial Point Cloud Hub. Use mouse for rotation, scroll to zoom, right-click for pan. Includes tools for measurements, sections, PNG+PGW export (georeferenced EPSG:3844 Stereo 70), and Solid Surface mode.
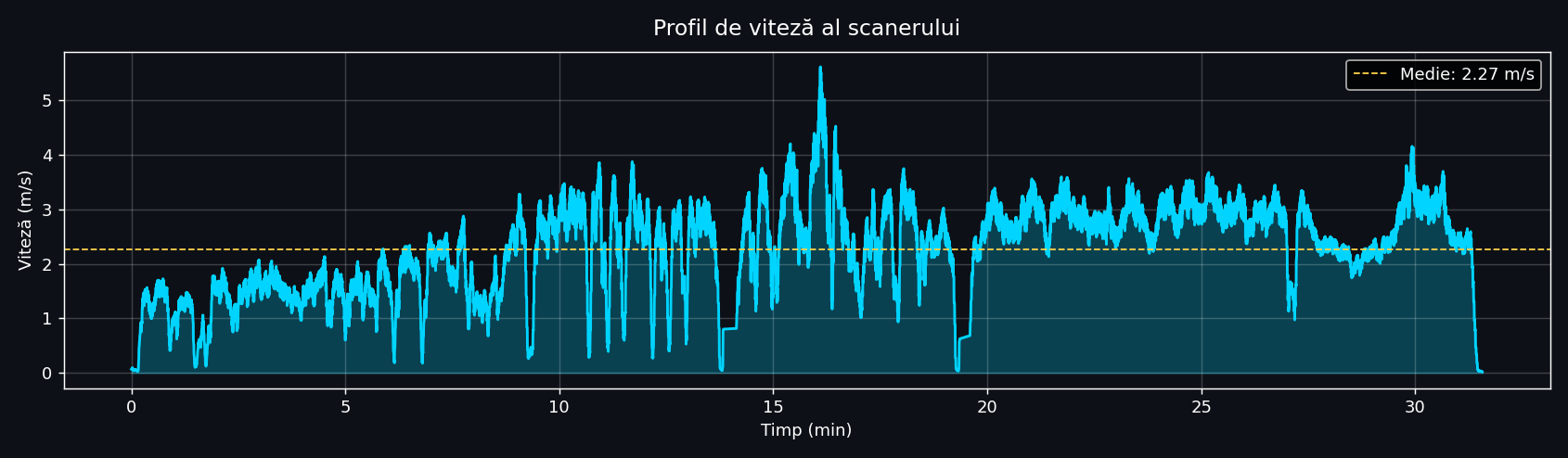
Speed profile
Control Points
The 2 control points (PT1, PT2) marked during the scan enable subsequent georeferencing of the dataset. Below are the panoramic frames captured at the moment of each point.
Technical specifications
FJD Trion S2 — SLAM LiDAR Scanner
| Manufacturer | FJDynamics |
| Model | Trion S2 handheld SLAM |
| Weight | 2 kg (cu baterie, cameră, IMU, RTK) |
| LiDAR sensor | multi-line laser scanner |
| Field of view | 360° × 270° |
| LiDAR range | up to 120 m (at 80% reflectivity) |
| Capture rate | 640.000 points / second |
| Relative accuracy | up to 1.2 cm |
| Cameras | 2× 12 MP (panoramic, georeferenced) |
| Positioning | SLAM + IMU + VIO + RTK / PPK |
| Coordinate systems | 8000+ (CRS supported) |
Scan characteristics
| Project | Facultate |
| Created | 21 April 2026, 12:32 |
| Duration | 31.6 min (0h-31m-32s) |
| Bounding box | 195.3 × 119.2 × 3.61 m |
| Path length | 1.659 km |
| Average / max speed | 8.16 / 14.50 km/h |
| Pose rate | 9.1 Hz |
| Panoramic frames | 3,793 per camera |
| Total images | 7,586 |
| LiDAR points | 6,515,872 |
| Operating mode | handheld, walking on ground |
UAV Orthophoto — WebODM result LIVE · 2D MAP
Complementary aerial component: orthophoto from 419 DJI Mini 2 images processed in WebODM, georeferenced Stereo 70.